What does the RP-VITA do?
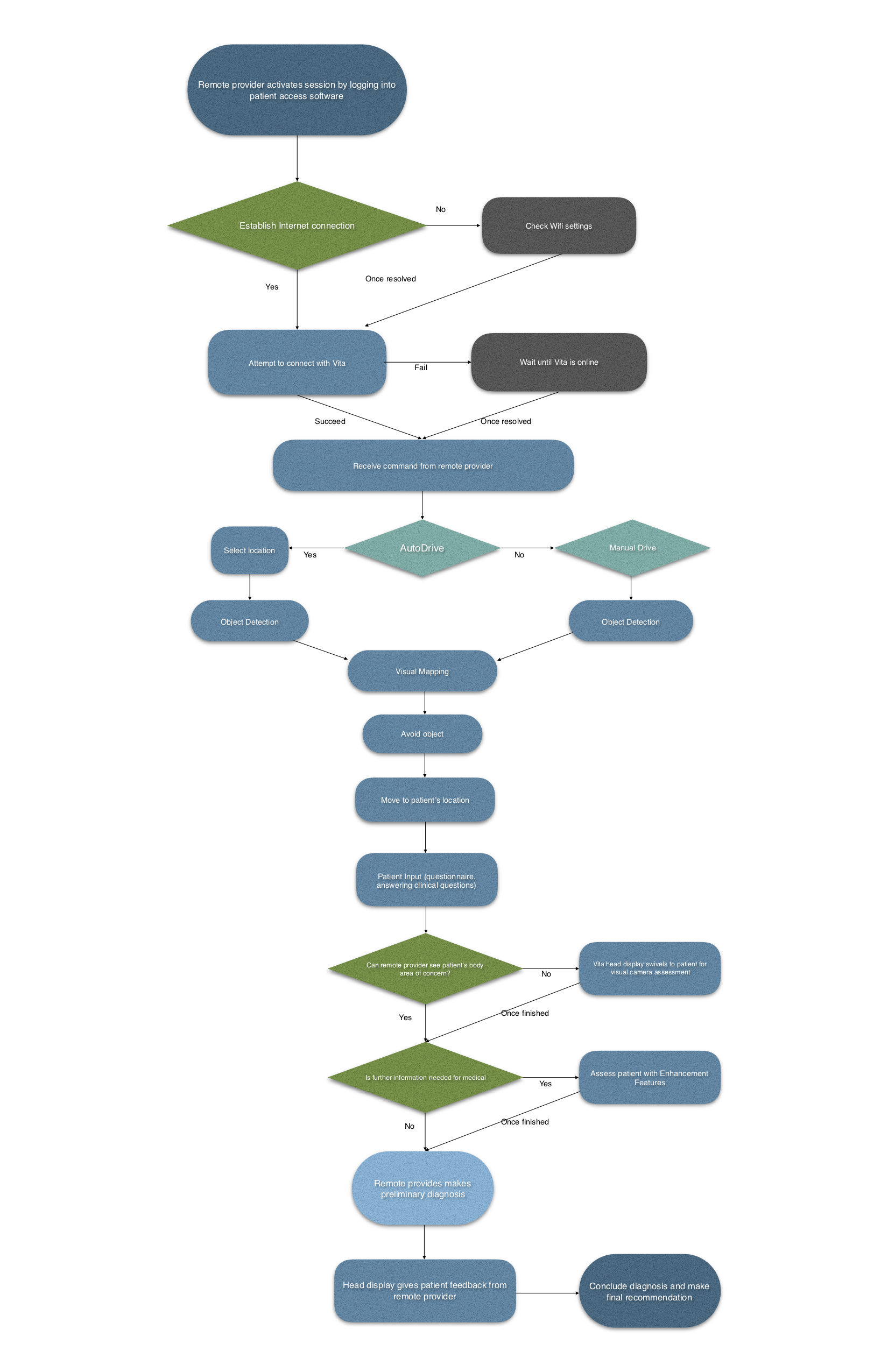
The clinical session begins when the remote provider logs in to the Provider Access Software. After establishing a strong network connection, the remote provider, who has primary control over the movement of Vita, initiates the AutoDRIVE function. Upon reaching the destination, the remote physician confirms that the patient is online (i.e. that the two-way audio and visual communications are live), and then the clinical session proceeds. Once the remote provider reviews the patient’s medical profile, he then may request additional patient input or by asking the patient, clinical questions. If the remote physician cannot visualize a particular part of the patient’s body, then using the Provider Access Software (PAS), he dictates the Vita head display to pivot in order to view and assess the affected area on the patient. When more information is needed, the patient-side provider may utilize enhancement features (ex: stethoscope or thermometer) to collect biometric data. Upon patient data collection, the remote provider makes a preliminary diagnosis. Then, the Vita Head Display offers feedback to the patient and allows time for any questions or concerns the patient may have for the remove provider. Finally, the remote provider concludes with a diagnosis/prognosis and share final recommendations to the patient.
Head Display:
The purpose of the iRobot VITA is for doctors to be able to respond more promptly to patient concerns via the affordances of telepresence. The Head Display plays a crucial contribution to this objective by providing an outlet for physicians to communicate with and monitor those they are treating without being in the same room as them. The Head Display works much the same way as popular software such as Skype. Once a secure Wi-Fi connection is established, doctors and patients can make use of the robot’s camera, speakers and display screen to conversate. Furthermore, the Head Display is programmed to monitor the patients continually and swivel in the direction of sudden noises (which, for instance, is critical if the patient suffers an unexpected stroke in the middle of the night). Important details about the patients and directions to the hospital can be registered in the Head Display. Lastly, the Head Display serves to personalize the robot, with sounds and images that express emotions or human characteristics. All of these features allow the doctor to establish trust and contact with their patients from afar while receiving important information that can assist them with their diagnosis. The device’s application can be extrapolated to facilitating communication in a cross-cultural environment. For instance, in Sierra Leone, the English language is not widely spoken despite being the official language of the state, and the adult illiteracy rate is currently at 48.3%; with that being said, it is quite difficult for the provider to effectively solicit the information required for medical diagnosis. Since Vita allows multiple channels for the patient to put in the information regarding his/ her symptoms (verbal description, text-based survey, pictographic interface), it gives the provider such flexibility and efficiency to deal with patients with diverse backgrounds.
Chest Display:
During an active session, the local user interfaces with the robot through the Chest Display touchscreen in order to ensure that local settings are configured and that the Vita device has a strong wireless network connection. From the homescreen, the local user (local provider) can activate the WiFi and navigate through settings to verify that the software is up-to-date. Later, the InTouch Health applications can be launched. While operating the application, local users can dictate the recording of patient data by accessing Provider Access Software (PAS) through the Chest Display, which also reflects PAS slides to the Head Display. Additionally, solutions to non-responding error notifications or mobility issues concerning the holonomic drive can be addressed by using the reset button or contacting the hospital IT Department. Patient data may be stored locally on the Vita and transmitted securely to remote providers.
Autonomous Mobility:
The robot uses SLAM technology (Simultaneous Location and Mapping) technology for its autonomous navigation and mobility application. Therefore, the system is first programmed with pre-existing maps of the indoor hospital environment. The remote user with the PAS application maintains primary control over the movement of the robot, which is typically the physician that is establishing telepresence. Once the remote user on the PAS gives the AutoDRIVE command, the user is urged to specify a location. That is registered as the destination for the robot. As it begins its mission, it uses the pre-programmed map of the location as a preliminary guide. Using LIDAR (Light Detection and Ranging) sensors, it detects obstacles by capturing the distance from them. This is achieved by measuring the time it takes for its light rays to bounce back from the obstacles and reach the sensor, from which it makes real-time calculations of the distances from the obstacles. All this data is added to the pre-existing map, to establish for a more suitable pathway at each second. The X and Y coordinates from the distance data captured by the LIDAR sensors is keyed into the holonomic drive system’s software program, which readily accepts such values.